Bluehats & UnivMobile , Présentation de la démarche design employée pour UnivMobile faite à la rencontre bluehats du 11 décembre 2019.
[pdf, jpg]
Mon université en 2030, Texte d'une intervention que j'ai faite dans le cadre d'une soirée Cap 2030, organisée par le EdFab à Cap Digital le 27 février (...)
Revenu et logement, Je livre ici quelques éléments de comparaison concernant mon niveau de vie, pour couper court à quelques idées reçues, et un condensé de nombreuses (...)
Revenu et travail d’un enseignant-chercheur, Cet article complète l'article Revenu et logement, en détaillant un peu le budget de mon ménage, mon parcours d'enseignant-chercheur en terme de (...)
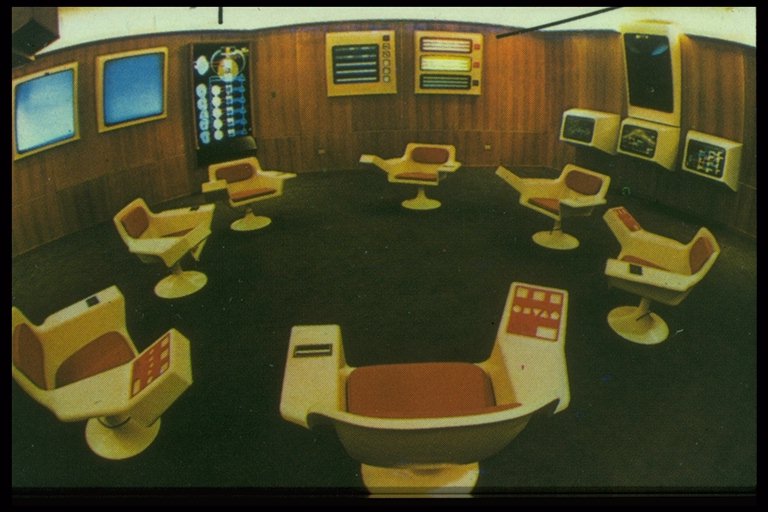
Cybersyn (el systemo synco), Au café, mardi 5 avril 2011, j'ai bien vu que, mis à part Antoine Allombert, personne ne connaissait l'histoire de l'extraordinaire projet chilien (...)
[jpg, jpg, png]
ADULLACT, Pour être un peu moins seul à défendre l'usage et le développement de logiciels libres dans mon travail (et autour), j'ai adhéré à l'ADULLACT en tant (...)
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}